


L’impression 3D n’en finit pas de nous étonner. Une équipe de chercheurs de l’Université d’État de Caroline du Nord (North Carolina State University, Raleigh, NC, 27695 USA) utilise l’impression 3D pour concevoir des structures flexibles contrôlables à l’aide de champs magnétiques.
Principe de fonctionnement des actionneurs flexibles magnéto actifs
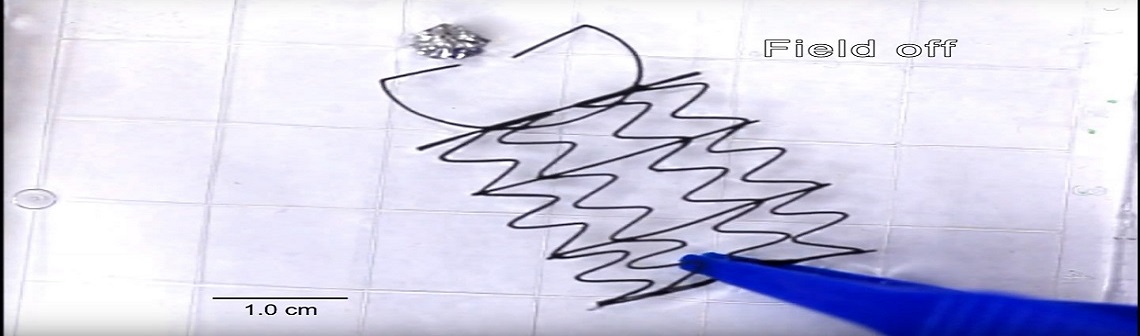
L’utilisation de champs magnétiques permet une stimulation rapide et à distance d’actionneurs flexibles magnétiquement actifs (cf. exemple d’un actionneur flexible magnétiquement actif, en action). De tels actionneurs peuvent être fabriqués en incorporant des particules magnétiques au sein d’une matrice souple, de type hydrogel ou élastomère. Sous l’effet d’un champ magnétique, les forces et couples magnétiques sont ainsi extraits des particules magnétiques, ce qui provoque une déformation de la structure souple dans laquelle elles sont emprisonnées.
Les domaines magnétiques anisotropes ont généralement tendance à s’aligner avec la direction du champ uniforme appliqué, notamment à cause de perturbations créées par des interactions entre particules, ce qui rend possibles les déformations dans des configurations multiples. Néanmoins, la fabrication d’actionneurs souples, capables de répondre à des sollicitations magnétiques multidirectionnelles reste un challenge. En effet, la réalité est plus complexe, car les domaines magnétiques polarisables sans magnétisme résiduel (rémanence) sont généralement uniquement attirés par la direction positive du gradient de champ magnétique.
Actionneurs multidirectionnels flottant sur l’eau
Pour surmonter ce challenge, l’équipe de chercheurs a conçu une nouvelle classe d’actionneurs magnéto-actifs imprimés en 3D et flottant en surface de l’eau. Ces structures ultrasouples, de forme ondulée sont ainsi capables de se déformer sous l’action combinée des forces magnétiques et capillaires. L’intérêt d’utiliser ces phénomènes de tension de surface est de réduire à leur minimum les forces de frottement qui empêcheraient la structure de se déformer.
Une encre à base de silicone
Le matériau utilisé pour fabriquer ces objets magnéto-actifs est une pâte (HCP), formée à partir de deux composants : des microbilles de polydimethylsiloxane (PDMS) réticulé autour de 20 % de particules magnétiques et un précurseur PDMS liquide (le liant capillaire).
Cette pâte est ensuite transformée en filaments, en utilisant un procédé d’impression 3D par extrusion directe. La structure 3D obtenue est ensuite polymérisée à 80 °C dans un four pour donner un matériau élastique, souple et hydrophobe, ce qui lui permet de flotter à la surface de l’eau.
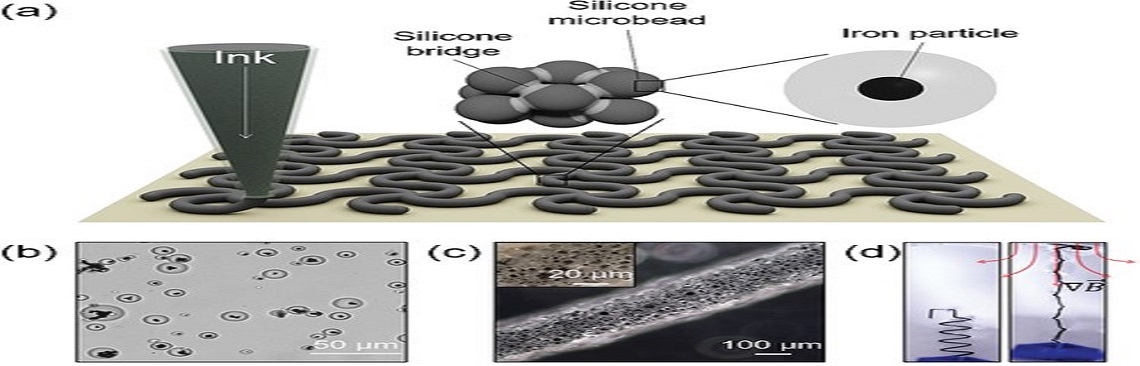
b) Cliché optique de microbilles de 80%m PDMS-20%m particules magnétiques ;
c) Filament homocomposite après impression 3D ;
d) Élongation d’un filament imprimé, sous l’effet d’un gradient de champ magnétique.
Source : https://wol-prod-cdn.literatumonline.com/cms/attachment/8d995ead-b1e3-49c7-bdbb-712abe0b2ad1/admt201800528-fig-0001-m.png
Des applications potentielles
L’équipe de chercheurs a donc réussi à synthétiser et à contrôler magnétiquement des actionneurs souples leur permettant par exemple d’attraper de petits objets flottant à la surface de l’eau. L’application présentée est certes basique, mais elle prouve qu’il est possible de contrôler efficacement une telle structure dans une direction en utilisant un simple électroaimant. Leurs prochains travaux s’orienteront donc sur la fabrication et le contrôle multidirectionnel de structures 2D et 3D.
Plus concrètement, plusieurs applications sont visées, comme la fabrication de structures 3D pour la culture de cellules ou encore la fabrication de robots miniatures se déplaçant à la surface de l’eau à la manière des insectes gerridés.
Sources : https://news.ncsu.edu/2019/01/3d-printed-soft-mesh-robots/
https://onlinelibrary.wiley.com/doi/10.1002/admt.201800528








Réagissez à cet article
Connectez-vous
Vous avez déjà un compte ? Connectez-vous et retrouvez plus tard tous vos commentaires dans votre espace personnel.
Vous n'avez pas encore de compte ?
Inscrivez-vous !