



L’arrivée de robots dans une salle d’opération est un peu plus récente que celle de la réalité augmentée. C’est pourtant une technologie tout à fait complémentaire puisqu’après avoir amélioré l’œil du chirurgien avant l’intervention (planification préopératoire) et pendant l’intervention (réalité augmentée), il s’agit de remplacer la main du chirurgien ou de lui en fournir une supplémentaire.
De plus, compte tenu de la grande précision de positionnement des robots, de leur capacité à adopter des postures inaccessibles à l’homme et enfin de leur miniaturisation éventuelle, ceux-ci apparaissent comme étant les outils idéaux pour faire le lien entre l’image médicale et le patient sous le contrôle du chirurgien.
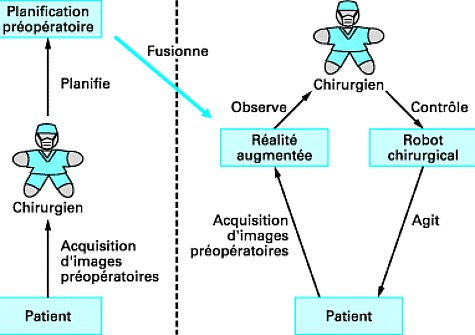
La figure 1 schématise comment la robotique médicale s’articule avec la réalité augmentée et la planification préopératoire. Il apparaît clairement que la robotique est une interface d’action du chirurgien sur le patient au même titre que la réalité augmentée est une interface de perception.
Mais c’est l’existence d’un contact entre la machine et l’homme qui donne une dimension particulière à cette technologie. Au-delà de l’existence d’une barrière psychologique pour le chirurgien et le patient, il s’agit de vaincre une autre barrière, technologique cette fois, qui vise à garantir la sécurité d’un système robotique, tant au niveau logiciel que matériel. Cette garantie s’obtient grâce à une conception adaptée de la mécanique du robot, évitant les mouvements aléatoires en cas de commande erronée ou d’alimentation électrique défaillante. Également, le logiciel du robot est validé à l’aide de techniques éprouvées de génie logiciel mais aussi par une validation systématique et à grande échelle des fonctionnalités du robot. Le contact ou la proximité d’un robot avec un patient impose une deuxième contrainte : la stérilisation partielle ou totale du robot. Ceci impose des choix spécifiques concernant la conception mécanique (possibilité d’extraire certains composants pour une stérilisation dans un autoclave) et la nature des matériaux utilisés.
En pratique, le terme de « robotique chirurgicale » est souvent utilisé pour désigner à la fois des robots qui assistent le geste du chirurgien et des robots qui effectuent un geste chirurgical. Dans la première catégorie, on exploite la précision, la force, la répétabilité du robot, alors que dans la seconde, on exploite plus souvent sa miniaturisation, sa précision et sa dextérité.
Parmi les robots qui assistent le geste du chirurgien, on peut citer les robots utilisés en neurochirurgie et qui sont destinés à porter les instruments chirurgicaux, un microscope (pour l’observation du champ opératoire) et un système de visée laser permettant de superposer les informations préopératoires (réalité augmentée). Également, la robotique peut permettre une certaine automatisation de la salle d’opération avec un objectif de gain de productivité et de temps d’exécution. Ainsi, il existe des manipulateurs robotisés, à l’extrémité desquels est placé un endoscope, qui permettent à un chirurgien de contrôler par la voix la position de cet endoscope dans une procédure de vidéochirurgie. Parmi les modèles de robots les plus récents, certains reposent sur le concept d’assistance semi-active au geste du chirurgien. Leur principe est simple : le robot est passif tant que l’outil chirurgical est à l’intérieur d’une zone déterminée lors de la planification préopératoire (pour éviter d’endommager des structures vitales) et, dans le cas contraire, le robot est actif en empêchant le mouvement de l’outil de pénétrer dans cette zone grâce à l’activation de moteurs (retour d’effort).
Figure 1 :
Depuis le début des années 1990, sont apparus des robots chirurgicaux conçus comme de véritables interfaces entre le chirurgien et le patient. Ceux-ci agissent directement au contact du patient et sont entièrement contrôlés par un chirurgien.
Jusqu’à présent des robots ont été destinés à deux types de chirurgie : la chirurgie orthopédique et la vidéochirurgie :
- les robots orthopédiques sont principalement utilisés pour leur faculté à se positionner et à effectuer des opérations de fraisage avec une très grande précision. De plus, pour ce type de chirurgie, et notamment pour la pose d’implants orthopédiques, la phase de planification s’avère être très délicate et repose souvent sur l’utilisation de logiciels sophistiqués. Dans ce contexte, l’utilisation de systèmes robotisés est une extension particulièrement bien adaptée à la pratique de cette chirurgie ;
- dans le domaine de la vidéochirurgie, le robot est utilisé comme un télémanipulateur : d’un côté de la salle d’opération, le chirurgien décrit le geste chirurgical à l’aide de manettes reliées à un calculateur et, de l’autre, le robot muni d’instruments chirurgicaux reproduit ces gestes à l’intérieur du corps du patient. Ce système de télémanipulation facilite énormément la gestuelle du chirurgien puisque le robot prend en charge la complexité de retranscrire ces gestes en tenant compte du fait que les instruments sont insérés dans la paroi abdominale (pour la laparoscopie ou cœlioscopie) et sont donc contraints à passer par un point fixe. De plus, le robot peut éventuellement réduire l’ampleur ou encore filtrer les gestes du chirurgien pour optimiser son efficience. Ces robots permettent ainsi d’effectuer des gestes qui étaient impossibles à réaliser auparavant et augmentent le champ d’application de la vidéochirurgie, par exemple pour la réalisation de pontages coronariens.
Si la robotique chirurgicale correspond naturellement à la prochaine génération d’instruments chirurgicaux, il existe plusieurs obstacles à son développement.
Tout d’abord, le coût des systèmes robotisés est très élevé et il est nécessaire de justifier quantitativement leur impact positif sur la santé des patients pour convaincre les organismes gestionnaires de la santé de les adopter.
Enfin, ils requièrent une mobilisation importante des chirurgiens et de leurs assistants pour se former à cette nouvelle conception de la chirurgie.
Par ailleurs, la généralisation de la téléchirurgie dont une expérience a été tentée avec succès entre Strasbourg (France) et New York (USA) est assez peu envisageable à grande échelle sauf pour des contextes militaires (chirurgie sur porte-avion ou sur champ de bataille) ou pour la formation des chirurgiens des pays en voie de développement.
Par Hervé Delingette
Et aussi dans les
ressources documentaires :







Réagissez à cet article
Connectez-vous
Vous avez déjà un compte ? Connectez-vous et retrouvez plus tard tous vos commentaires dans votre espace personnel.
Vous n'avez pas encore de compte ?
Inscrivez-vous !