



Porté par le CEA-LIST, ce gant haptique à retour d'effort vise à fournir le maximum de sensations dans un minimum de place. Il se destine aux applications de pilotage robotique et de réalité virtuelle.
Mandarin ne ressemble pas du tout aux robots humanoïdes qui arpentent les couloirs du salon Innorobo ou assemblent des pièces mécaniques à toute vitesse. Et pourtant, c’est bel et bien un projet qui promet d’améliorer l’interaction homme-machine, enjeu important de l’industrie robotique. Mandarin, donc, est un gant à retour de force, développé par le CEA-LIST (Laboratoire d’intégration de systèmes et des technologies du CEA) en partenariat avec l’INRIA, Haption, l’Université technologique de Compiègne ou encore Renault. Il bénéficie du soutien financier de l’Agence Nationale de la Recherche. «L’objectif est d’achever un prototype pré-industriel d’ici à la fin de l’année 2016» déclare Florian Gosselin, l’ingénieur de recherche qui coordonne ce projet.

Les dispositifs haptiques (qui procurent la sensation du toucher, NDLR) et à retour d’effort sont utilisés dans l’industrie pour piloter à distance des robots ou interagir avec des maquettes numériques dans les environnements de réalité virtuelle. «Traditionnellement, il s’agit de robots équipés de poignées excluant la manipulation dextre des objets en question, explique Florian Gosselin. Des gants similaires existent sinon, mais ils se limitent à deux doigts, avec un certain degré de perfectionnement, ou à plusieurs doigts, avec une sophistication moindre. Le principe du projet Mandarin est d’obtenir une interaction naturelle à deux mains (un gant pour main gauche a aussi été développé) qui implique tous les doigts sauf le petit. Cette configuration permet de couvrir la plupart des cas d’usage.»
Moteurs vibrants et capteurs optiques
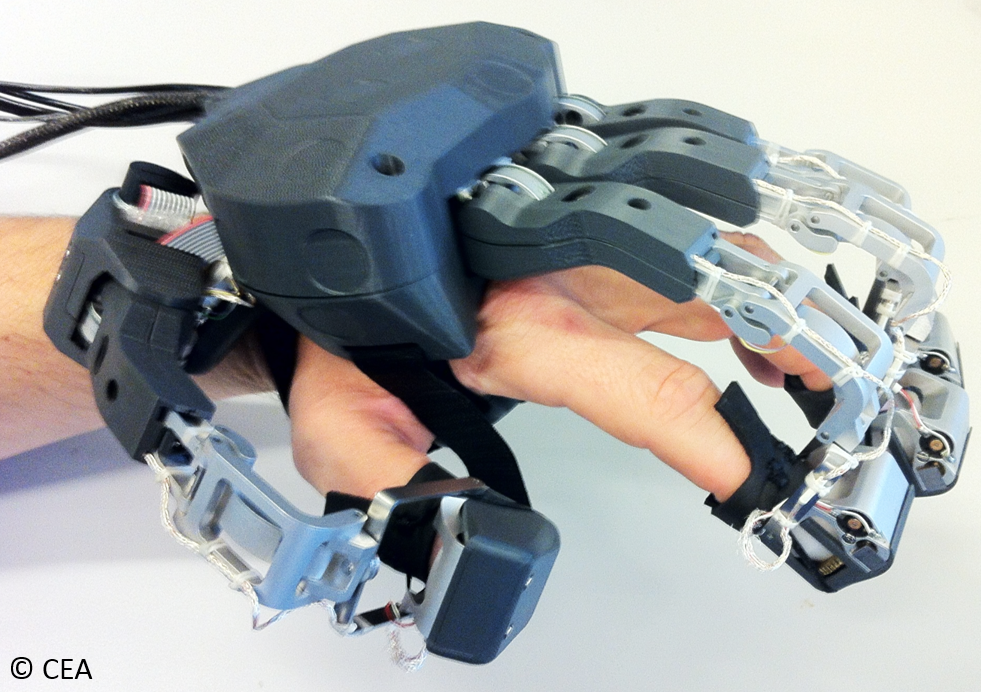 Imiter la cinématique d’une main constitue toutefois un défi technique et oblige à des compromis. «Normalement, trois petits moteurs associés à chaque bout de doigt seraient nécessaires pour reproduire tous les degrés de liberté, précise Florian Gosselin. Mais avec quatre doigts, cela devient trop complexe, lourd et encombrant : il fallait simplifier. Les alternatives consistant à déporter les moteurs, moyennant une câblerie supplémentaire, ou à réduire le nombre de doigts ont été rejetées. Pour ce projet, nous avons décidé d’innover en insérant quatre moteurs dans la paume du gant, qui régulent l’effort de pinçage lors de la saisie d’un objet. Quatre autres moteurs miniatures servent à déformer la pulpe des doigts, par exemple en vibrant selon les mouvements.»
Imiter la cinématique d’une main constitue toutefois un défi technique et oblige à des compromis. «Normalement, trois petits moteurs associés à chaque bout de doigt seraient nécessaires pour reproduire tous les degrés de liberté, précise Florian Gosselin. Mais avec quatre doigts, cela devient trop complexe, lourd et encombrant : il fallait simplifier. Les alternatives consistant à déporter les moteurs, moyennant une câblerie supplémentaire, ou à réduire le nombre de doigts ont été rejetées. Pour ce projet, nous avons décidé d’innover en insérant quatre moteurs dans la paume du gant, qui régulent l’effort de pinçage lors de la saisie d’un objet. Quatre autres moteurs miniatures servent à déformer la pulpe des doigts, par exemple en vibrant selon les mouvements.»
Le poids, l’encombrement et l’ergonomie sont les autres facteurs décisifs. «La structure est compacte, proche des doigts de l’utilisateur, décrit Florian Gosselin. Nous avons également opté pour des capteurs optiques innovants placés autour des axes des articulations, de manière à gagner en intégration.» Mandarin, grâce à ses embouts, a de plus l’avantage de s’adapter à toutes les tailles de main et longueurs de doigts. Bien des applications industrielles lui iraient comme un gant…
Par Frédéric Monflier









Réagissez à cet article
Connectez-vous
Vous avez déjà un compte ? Connectez-vous et retrouvez plus tard tous vos commentaires dans votre espace personnel.
Vous n'avez pas encore de compte ?
Inscrivez-vous !