



Voler en essaim comme les abeilles, marcher sur les murs comme le gecko, être agile comme la pieuvre... Les animaux fascinent les chercheurs qui s’en inspirent pour créer des robots plus efficients. Décryptage.
« La nature a trouvé des solutions très diverses et hautement optimisées, après des millénaires d’évolution, à un nombre incalculable de problèmes, remarque Antoine Cully, directeur de l’Adaptive & Intelligent Robotic Lab de l’Imperial College de Londres. Par exemple, comment marcher, nager, grimper, produire de l’énergie, comment affronter des conditions extrêmes, etc. ». Des problèmes que rencontrent également les ingénieurs en robotique, s’inspirant ainsi des facultés d’adaptation de la nature. S’inspirer, et non copier.
« Lorsqu’on souhaite copier le biologique, une démarche scientifique qui a beaucoup de sens pour la recherche, on parle de biomimétisme, explique Jean-Baptiste Mouret de l’équipe Larsen d’Inria. Cependant, lorsqu’on prend un bout de la biologie sans aller jusqu’à la copie de son ensemble, il s’agit de bioinspiration. Parfois, il est très intéressant de copier la nature pour savoir jusqu’où la science est capable d’aller pour mieux comprendre la nature. Et d’autres fois, on souhaite juste s’inspirer d’un phénomène particulier ». C’est le cas notamment des développements robotiques.
Quelques freins à échelle nanométrique
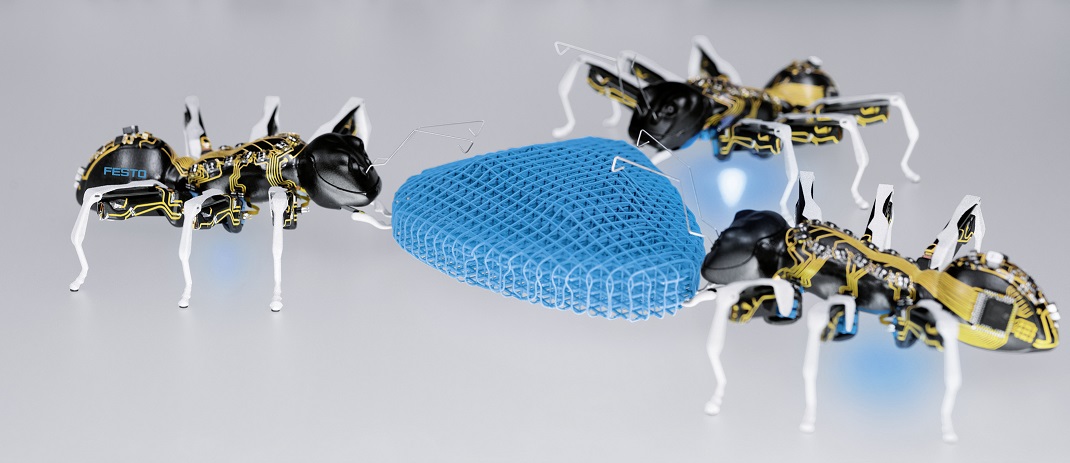
Les recherches en robotique bioinspirée sont nombreuses. Antoine Cully prend l’exemple du drone : « Une équipe de l’EPFL explore de nouvelles formes d’ailes pour permettre à des drones de voler plus longtemps. Dans la même direction, des chercheurs de Stanford étudient des ailes créées à base de vraies plumes pour améliorer la manœuvrabilité des robots ». D’autres recherches portent sur la dextérité des pieuvres, les pattes « ventouses » des geckos, la collaboration des fourmis, sans oublier les mains humaines… Le roboticien Festo a d’ailleurs dévoilé en août dernier son « BionicSoftHand 2.0 », un robot collaboratif doté d’une main. « Pour copier une main humaine, il faudrait beaucoup de moteurs, explique Jean-Baptiste Mouret. Ainsi, on étudie quels sont les mouvements les plus utiles pour l’être humain afin de les reproduire sur le robot. On simplifie le modèle biologique. »
Le cerveau et la capacité d’un individu à se repérer dans l’espace font partie des recherches en robotique. « Dans les drones, on retrouve beaucoup d’applications autour du bioGPS, explique Agnès Guillot, docteure en psychophysiologie et biomathématique, spécialiste en robotique bio-inspirée. C’est-à-dire comment un drone peut s’orienter seul pour faire une cartographie de son environnement. Dans les neurosciences computationnelles, les neurophysiologistes ont étudié les circuits nerveux pour faire fonctionner un robot ». Ce bioGPS a par exemple été utilisé chez AntBot, un robot fourmi capable de naviguer en extérieur, de manière autonome, sans GPS intégré.
Sans oublier l’intelligence artificielle neuromorphique, pour réaliser des algorithmes de prise de décision en temps réel. Une équipe de recherche du CNRS dirigée par la chercheuse Julie Grollier a même reproduit des neurones et synapses artificiels en « dur ».
« Les scientifiques réussissent à reproduire un certain nombre de choses, mais pas encore à imiter la nature à l’échelle nanométrique, affirme Agnès Guillot. Et c’est à cette échelle que se réalisent les progrès. Par exemple, on n’a jamais réussi à réaliser un muscle artificiel fiable. Cela est très compliqué ». Les robots sont plutôt équipés de moteurs – hydrauliques chez Boston Dynamics par exemple – et non de muscles artificiels. « La volonté de Boston Dynamics est de réussir à réaliser sur des machines l’agilité des animaux, précise Jean-Baptiste Mouret. Ils ont commencé par les pattes avec Big Dog mais ont surtout fait beaucoup d’ingénierie qui n’a rien à voir avec la biologie. »
Quand la recherche sort du labo
Les recherches en robotique bioinspirée intéressent l’industrie. Début 2020, les robots Spots ont par exemple fait leurs premiers pas dans des installations offshore. La Nasa s’est inspirée des pattes du Gecko pour développer Lemur (pour Limbed Excursion Mechanical Utility Robot), un robot capable de grimper sur la paroi externe de la Station Spatiale Internationale.
L’étude du flux optique – la vitesse de déplacement des objets sur la rétine – des insectes a permis à l’Institut des sciences du mouvement de Marseille de développer des capteurs intégrés aujourd’hui sur des drones. « En étudiant certains neurones des yeux d’insectes, les chercheurs ont analysé la stratégie utilisée par ces animaux pour voler dans des environnements très compliqués », précise Jean-Baptiste Mouret.
« Malgré tous les récents progrès en robotique de ces dernières décennies, on peine toujours à voir une grande diversité de robots fonctionnant en dehors des environnements très contrôlés des usines, à l’exception des robots aspirateurs, ajoute Antoine Cully. Mon opinion est que concevoir ce genre de robot demande de grands investissements afin de s’assurer que les robots pourront faire face à une grande diversité de situations ».
Photo de Une : La capacité adhésive des pattes de geckos intéresse les chercheurs.








Réagissez à cet article
Connectez-vous
Vous avez déjà un compte ? Connectez-vous et retrouvez plus tard tous vos commentaires dans votre espace personnel.
Vous n'avez pas encore de compte ?
Inscrivez-vous !